Ilya Sutskever의 한 마디 (L01-3)
시작 전 이 강의를 왜 들어야 하는지 Ilya Sutskever(OAI 공동창업자)의 말을 인용하겠다.
2017년 ACM 튜링상 50주년 행사에서 한 말로, “Compute has been the oxygen of deep learning” 이다. 알고리즘이 아무리 좋아도 Compute 없이는 돌릴 수가 없다는 뜻이다. 역으로 읽으면 Compute를 더 효율적으로 만드는 사람이 딥러닝 발전의 병목을 해결한다는 말과도 일맥상통한다.
이는 곧 MLSys가 AI-resistant한 커리어인 이유이기도 하다. AI 모델이 아무리 바뀌어도 (CNN → Transformer → MoE → Mamba…) 결국 Compute는 필연적인 존재다. 모델을 만드는 사람은 새 아키텍처가 나올 때마다 리셋되지만, 그 모델을 효율적으로 돌리는 하드웨어/시스템 인프라를 다루는 사람은 계속 수요가 있다.
AI Ingredients — AI 폭발의 3대 요소 (L01-2)
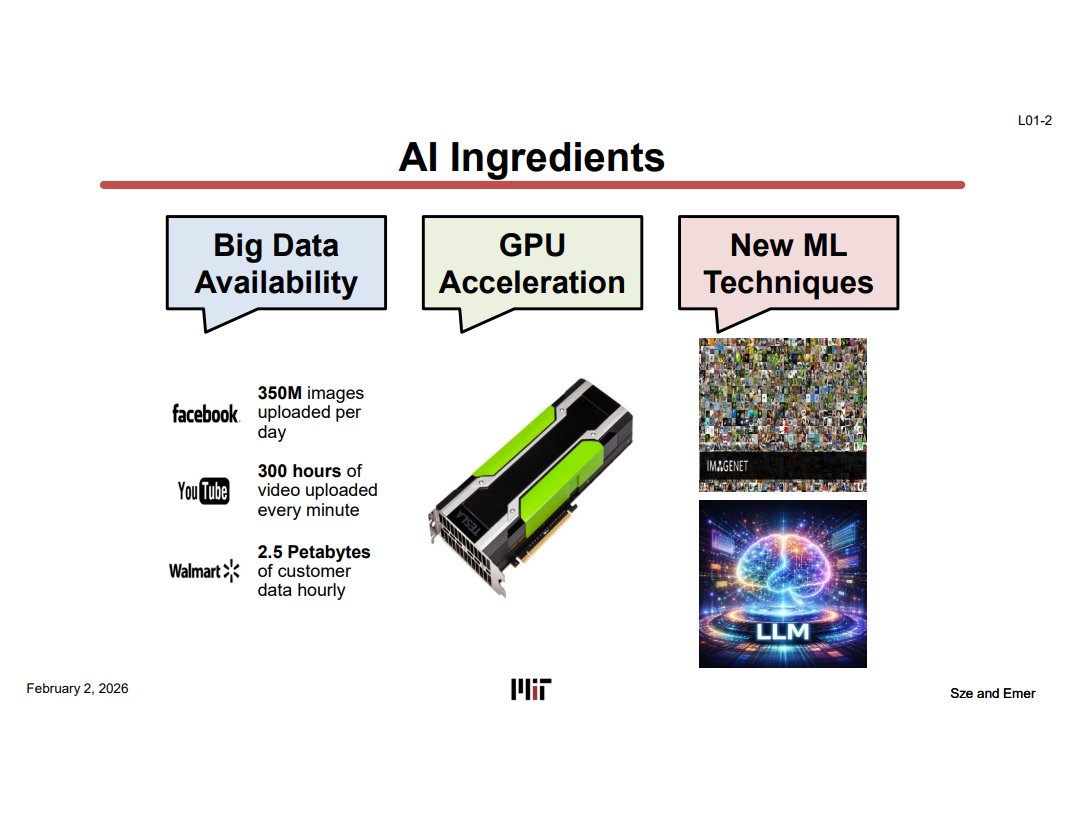
Big Data — Facebook 하루 3.5억 장 이미지, Youtube 분당 300시간 영상, Walmart 시간당 2.5PB. 이런 데이터가 존재하므로 LLM 같은 모델을 학습시킬 수 있다.
GPU Acceleration — Tesla T4 같은 GPU는 CPU로는 빠르게 못 돌리는 MatMul을 가능케 한다. 수백~수천 개의 코어로 병렬 연산을 진행하므로 이전에는 비현실적이던 딥러닝 학습이 현실적 시간 안에 가능해졌다.
New ML Techniques — AlexNet이 CNN 시대를 열었고 지금은 LLM/Transformer가 대세가 되었듯이, 알고리즘이 발전하면서 하드웨어의 요구사항도 꾸준히 변한다.
GPU가 DNN 전용으로 진화하는 과정 (L01-4)
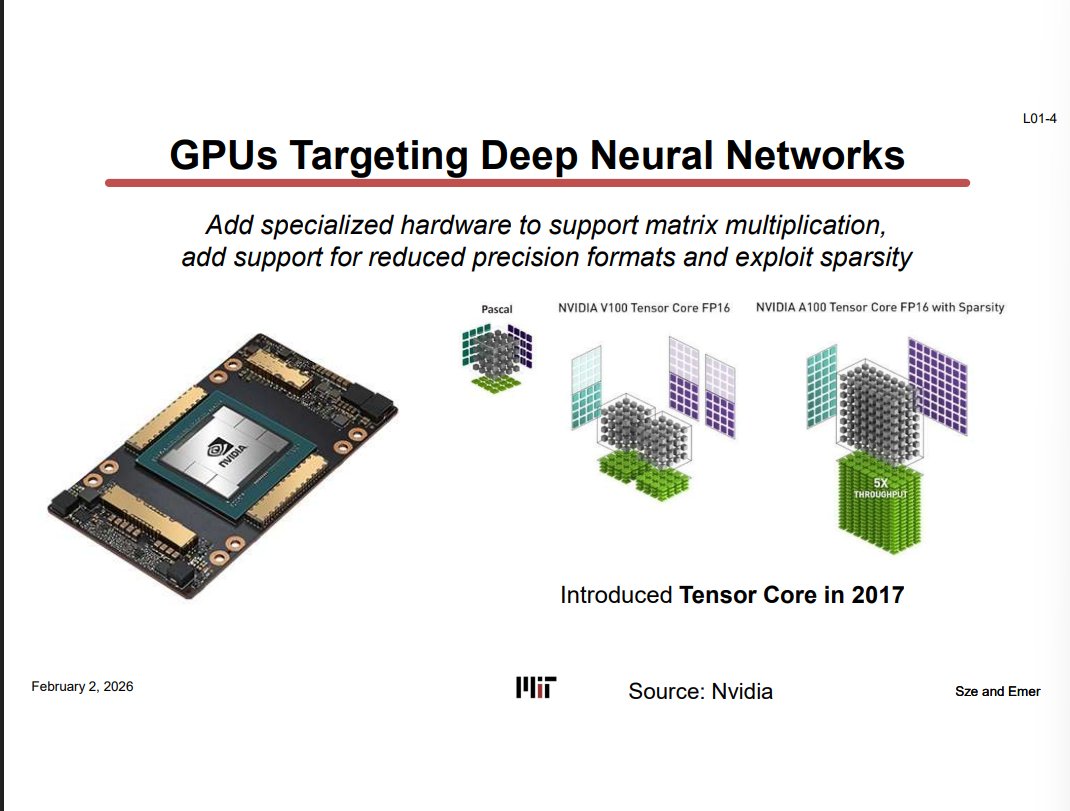
2016년 Pascal 아키텍처 탄생 이후, 범용 CUDA 코어로 MatMul(FLOP)을 진행할 수 있게 되었고, 1년 후 2017년에 V100 Tensor Core가 탄생했다 (FMA 같은 assembly instruction에 친화적인 유닛). 범용 CUDA 코어 대비 같은 칩 면적에서 throughput이 몇 배 단위로 뛰었고, FP16 정밀도 지원으로 연산 속도가 비약적으로 상승했다.
2020년에는 A100 Tensor Core 탄생으로 Sparsity 지원이 추가되었다. 가중치의 50%가 0이면 건너뛰고 유효한 값만 연산하여 throughput을 올리는 테크닉이다.
Note: A100의 sparsity는 아무 sparse matrix나 되는 게 아니라 2:4 structured sparsity (연속 4개 원소 중 정확히 2개가 0)만 하드웨어가 인식하고 가속함. 이 제약 때문에 pruning 알고리즘과 하드웨어 sparsity 패턴이 같이 맞아야 하는데, 이것이 algorithm-hardware co-design의 핵심이다.
Software Companies Building HW (L01-5)
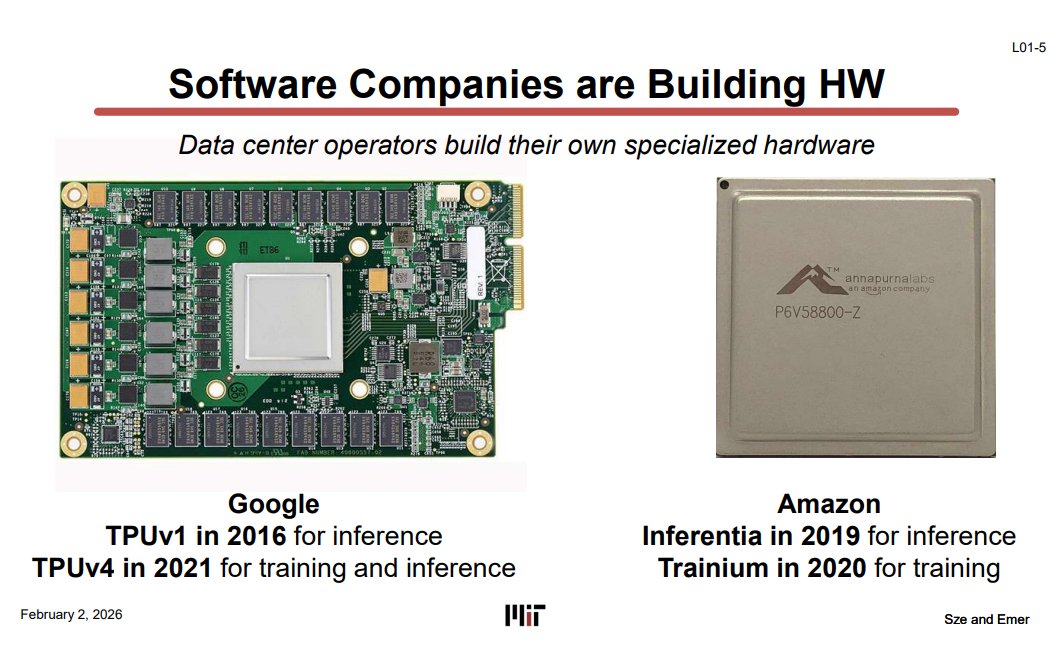
지금까지 언급된 디바이스들은 대부분 NVIDIA 제품이다. 그런데 왜 Google, Amazon이 직접 칩을 만들까?
결론부터 말하면 비용 + 최적화이다. NVIDIA GPU는 범용이라 DNN 이외의 것도 다 돌릴 수 있게 설계되었지만, Google 입장에선 데이터센터 작업의 대부분이 DNN Inference/Training이니까, 거기에 딱 맞는 칩을 만들면 전력/면적 대비(TOPS/W, TOPS/mm²) 성능이 훨씬 나온다.
- Google TPU — v1(2016)은 Inference 전용, 256×256 systolic array로 행렬곱 특화. v4는 Training도 지원.
- Amazon Inferentia/Trainium — AWS에서 돌리는 모델들의 inference/training 비용을 줄이려고 만든 것.
- 국내에서도 FuriosaAI, Rebellions 등이 같은 방향으로 설계하고 있다.
Cerebras WSE (L01-6)
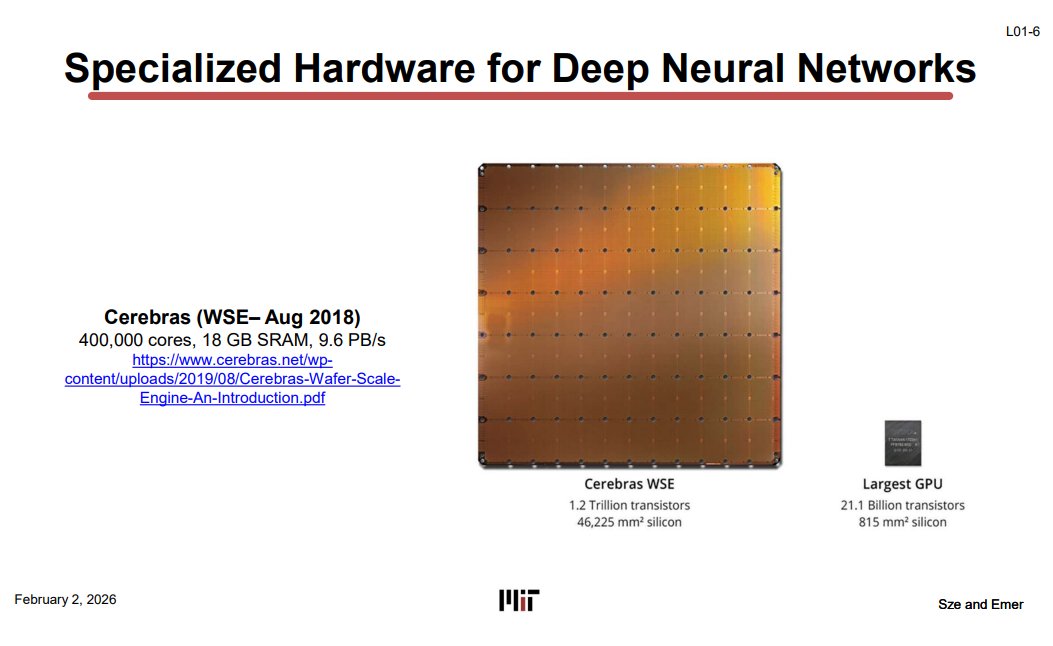
재미있는 극단적 사례로 Cerebras WSE가 있다. 보통 칩은 웨이퍼에서 잘라낸 작은 die 하나인데, Cerebras는 웨이퍼 전체를 하나의 칩으로 사용한다. 덕분에 무려 18GB SRAM을 자랑한다 (A100은 20MB 안팎, TPU도 32MB 이내).
다만 현실적으로는 수율, 냉각, 가격 문제가 심해서 널리 쓰이진 않고, domain-specific 설계가 어디까지 갈 수 있는지 보여주는 사례 정도로 이해하면 된다.
Mobile SoCs for DNNs (L01-7)
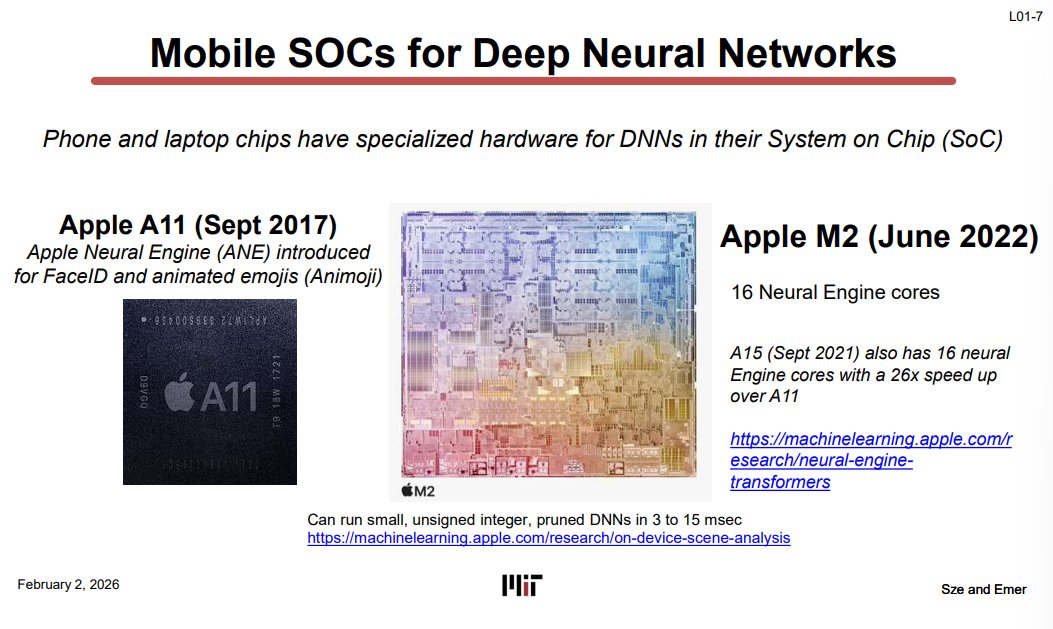
데이터센터뿐 아니라 폰/노트북 칩에서도 DNN 전용 유닛이 들어간다. Edge Device AI의 시대가 도래하고 있음을 시사한다.
- Apple A11 (2017) — 처음으로 ANE(Apple Neural Engine) 탑재. FaceID, Animoji 같은 on-device inference용.
- Apple M2 (2022) — 16 Neural Engine 코어. A11 대비 26배 속도 향상. 코어 수는 같은데 속도가 26배라는 건 코어 아키텍처 자체가 세대마다 크게 개선되었다는 뜻.
- ANE가 잘 돌리는 조건: 작고, 정수 양자화되어 있고, pruning된 모델 → on-device inference의 현실적 제약.
컴퓨팅 에너지 소비의 폭발적 증가 (L01-8)
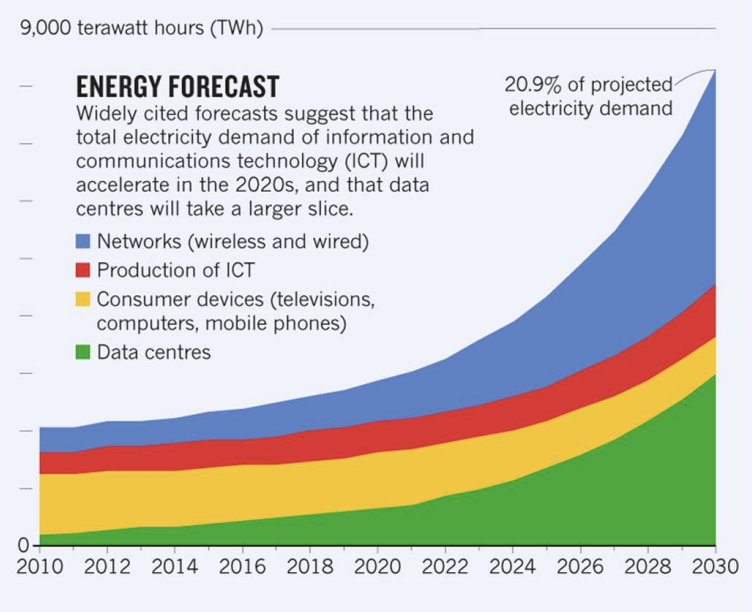
데이터센터가 미국 전체 전력의 3%(2022) → 8%(2030 예상)을 차지하게 될 것이라는 전망이다 [Goldman Sachs, April 2024]. ICT 전체가 전 세계 전력의 20.9%를 차지할 것이라는 예측도 있다.
모델 크기는 꾸준히 커지는데 전력은 무한하지 않으므로, 같은 연산을 더 적은 에너지로 하는 것이 핵심 과제가 되었다.
여기서 중요한 사실: data movement가 computation보다 에너지를 훨씬 많이 먹는다. DRAM 접근은 ALU 연산 대비 약 200배의 에너지를 소모한다. 즉 accelerator 설계의 핵심은 연산을 빠르게 하는 것이 아니라 데이터를 얼마나 덜 움직이느냐에 있다.
이 문제를 해결하는 접근법들:
- On-chip SRAM 확대 — Cerebras WSE가 18GB SRAM을 박은 것도 DRAM 접근을 줄이기 위함
- FlashAttention — HBM에서 전체 attention matrix를 만들지 않고, SRAM에 올라가는 크기로 tiling해서 SM 내부에서 연산을 완료. 정확도 손실 없이 메모리 접근을 줄여 속도를 올리는 방식
- Memory hierarchy 설계 — register file → local buffer → global buffer → DRAM 순으로 가까운 메모리에서 최대한 데이터를 재사용 (이 수업 후반부에서 자세히 다룸)
결국 공통 원리는 하나다: 데이터를 가능한 한 compute 가까이에 두고, 멀리 있는 메모리에 접근하는 횟수를 최소화한다.
Computing Cost of ChatGPT (L01-12)
GPT-3는 96개 레이어, 175B 파라미터, 학습에 필요한 부동소수점 연산은 총 3.14×10²³ FLOPS.
- V100 한 장으로 돌리면 355년 소요
- 클라우드로 돌려도 약 $4.6M(한화 ~60억 원) 소요
- GPT-4는 $100M+(한화 ~1,300억 원 이상) 추정
Changing Trends — DeepSeek (L01-13)
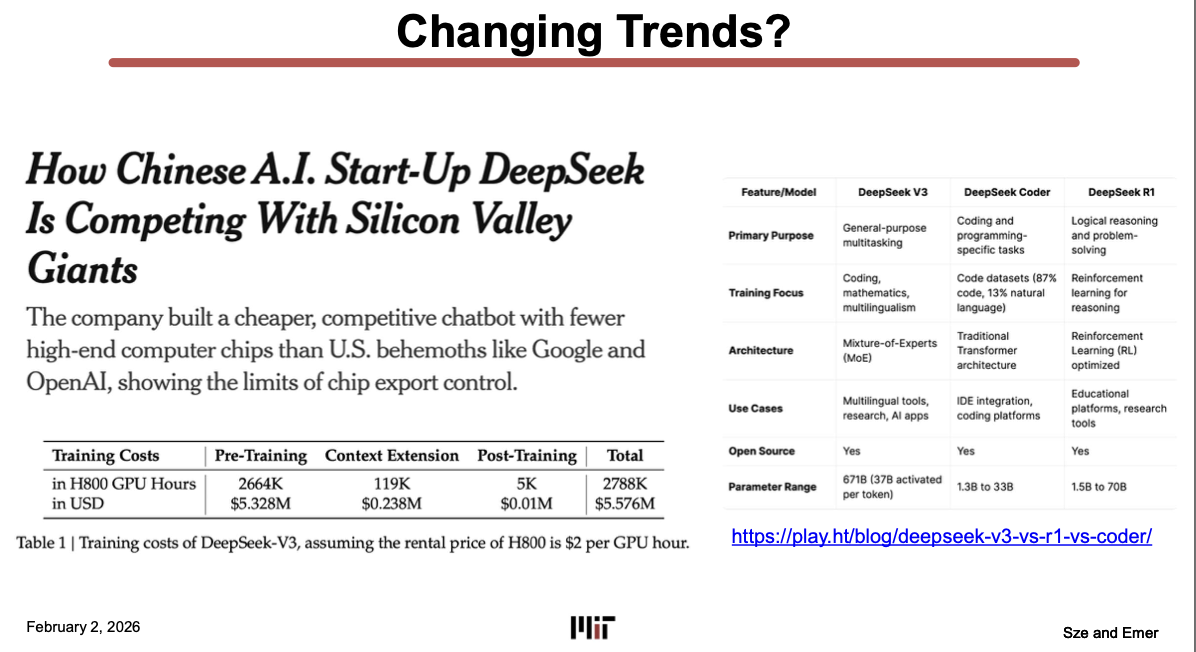
GPT-4가 1,300억 이상 소요한 학습을, DeepSeek는 약 80억 원으로 해냈다. 이로 인해 기존 모델들을 훨씬 싸게 경쟁력 있게 만드는 데 시장 경쟁이 붙고 있다.
DeepSeek의 핵심 기법: MoE(Mixture of Experts) 아키텍처 — 671B 파라미터지만 토큰당 37B만 활성화. 전체 파라미터를 다 돌리는 게 아니라 필요한 Expert만 선택적으로 돌려서 Compute 효율을 극적으로 올렸다.
Training vs Inference (L01-15)
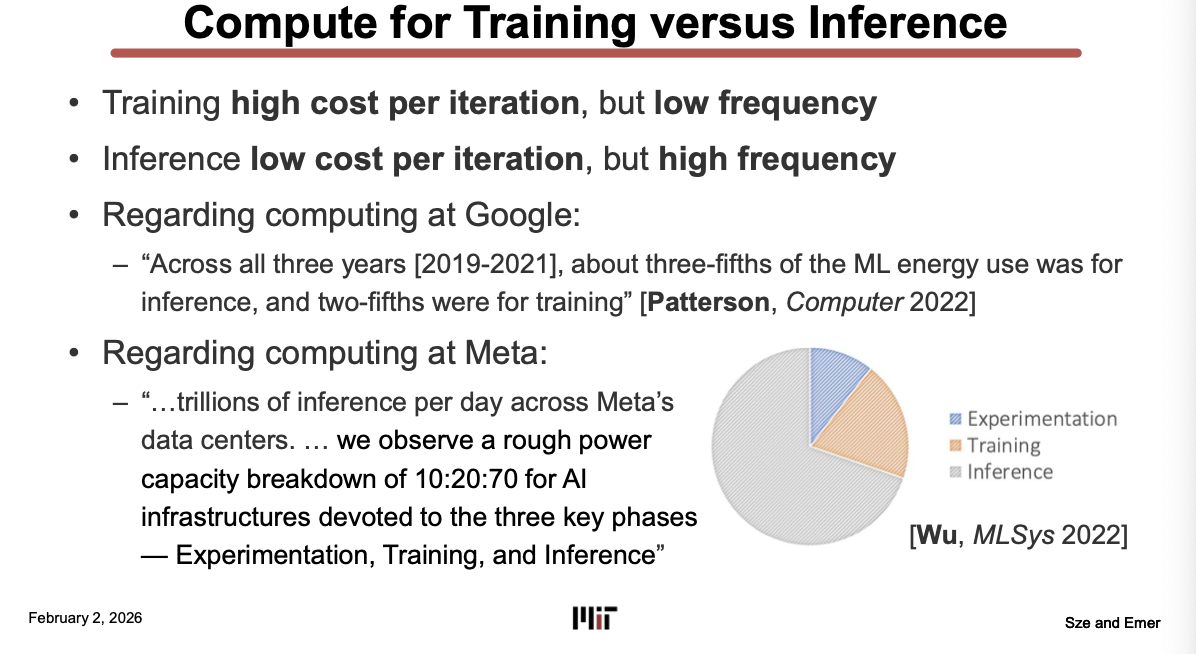
DNN의 연산은 크게 두 가지로 나뉜다:
- Training — 한 번에 비용 크지만 가끔 진행 (모델을 한 번 학습해 적절한 가중치를 구하면 끝)
- Inference — 한 번에 비용 적지만 매일 수조 번씩 돌아감 (Agent에게 Q를 날려 A를 얻으면 Single-turn Inference 한 번 발생)
즉 Training보다 Inference의 누적 비용이 압도적으로 크다. 이 때문에 LLM Inference Optimizing 직군이 각광받고 있다.
On-Device의 장점 (L01-18)
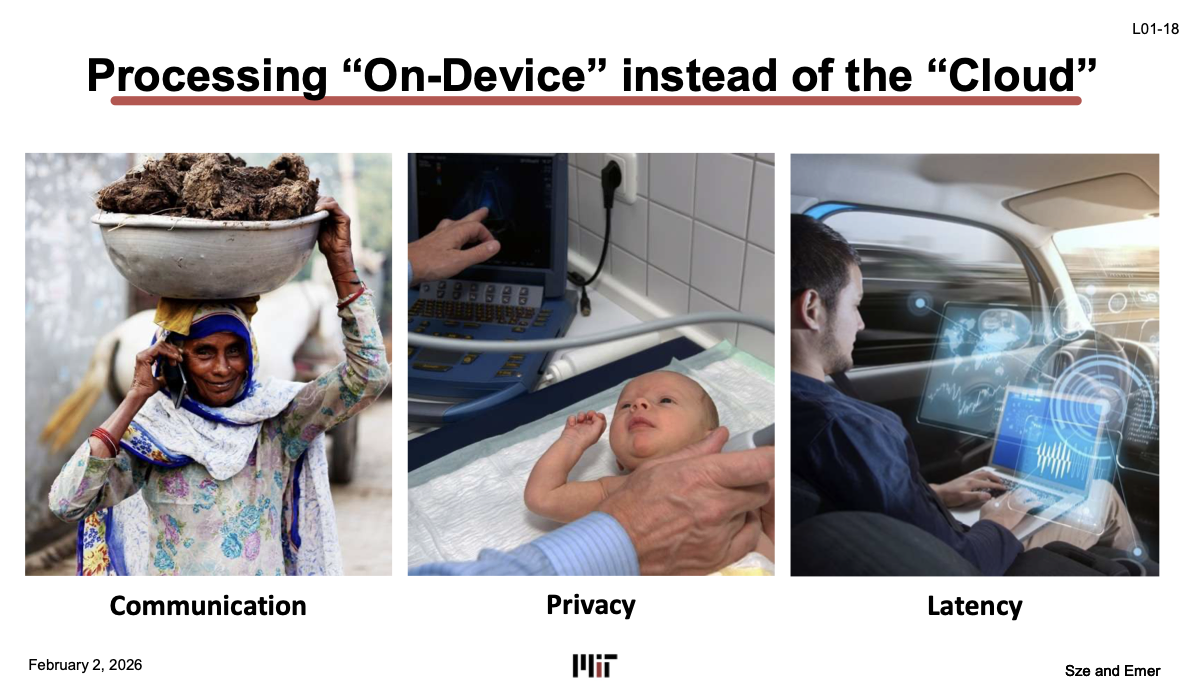
On-Device는 Cloud 대비 세 가지 장점이 존재한다:
- Communication — 네트워크가 없거나 불안정한 환경(개발도상국, 오지 등). 클라우드에 연결 못 하면 AI를 쓸 수 없음.
- Privacy — 의료(EMR, EHR), 국방(Palantir) 데이터 같은 민감한 정보를 클라우드로 보내면 안 됨. 디바이스에서 직접 처리하면 데이터가 밖으로 leak될 일 없음.
- Latency — 자율주행처럼 실시간 반응이 필요한 경우. 클라우드 왕복 지연(수십~수백ms)이 치명적. 말단 디바이스에서 바로 처리해야 함.
Self-Driving Cars (L01-19)
자율주행은 Edge Inference의 대표 사례다:
- 카메라 + 레이더가 약 30초마다 ~6GB의 데이터를 생성
- 자율주행 자동차 1대 = DNN × 60Hz × 10개 카메라 = 시간당 21.6M 번의 Inference
- 100만 대 기준 = 시간당 21.6조 번의 Inference
- 프로토타입 컴퓨팅에만 2,500W 소모 → 공랭 불가, 수냉/액침냉각 필요
- 클라우드로 보내면 Latency 때문에 사고 위험
Moore’s Law 둔화와 Domain-Specific HW의 필요성 (L01-22)
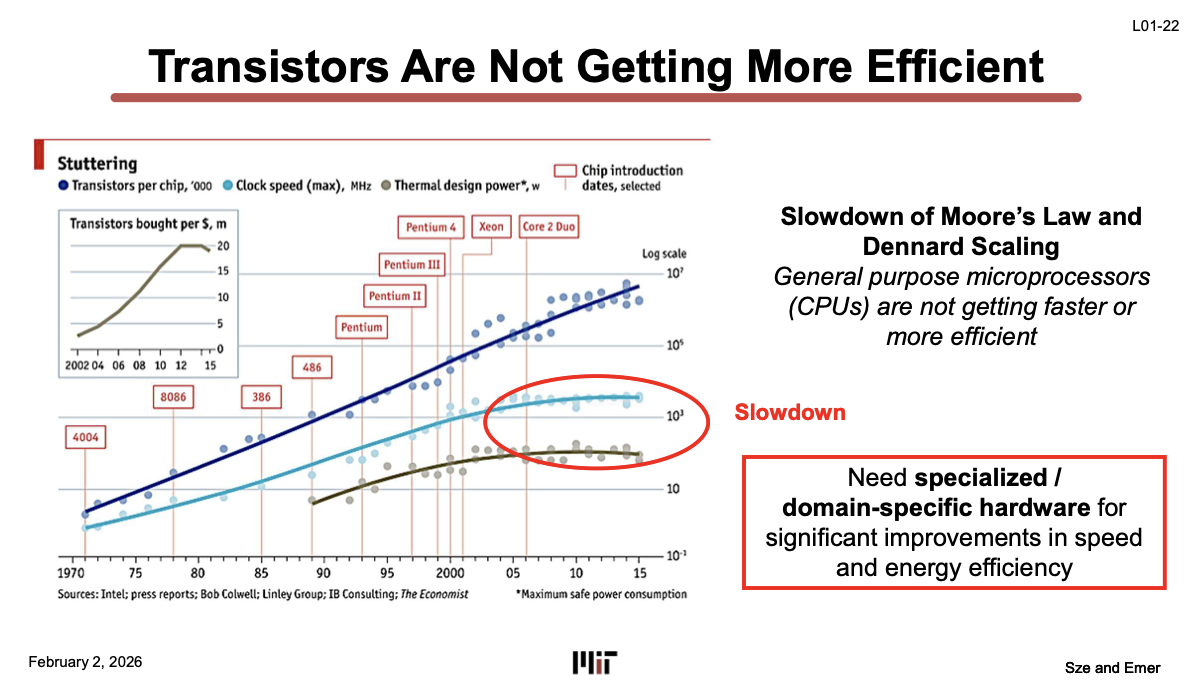
MLSys가 근본적으로 존재하는 이유:
- Moore’s Law 둔화 — 트랜지스터 수는 여전히 늘어나지만 속도는 느려짐. 달러당 트랜지스터 수도 정체.
- Dennard Scaling 종료 — 예전에는 트랜지스터가 작아지면 전력도 비례해서 줄었음. 2005년쯤부터 이게 깨짐. 그래프에서 clock speed(파란색)와 TDP(회색)가 flat해진 게 보임.
→ 더 이상 범용 프로세서의 성능/효율이 자동으로 올라가지 않음 → Domain-specific hardware가 필요
범용(General Purpose, e.g. CPU)은 워드, 게임, 웹브라우저, DNN 등 모든 작업이 가능하지만 어느 작업에도 특화되어 있지 않음. Domain-specific hardware는 특정 도메인에 최적화된다:
- NVIDIA Tensor Core — 행렬곱 전용
- Google TPU — DNN Inference/Training
- Apple ANE — On-device DNN Inference
- FuriosaAI NPU — AI Inference
L01-23 ~ L01-25: CPU Pipeline의 진화
CPU(General Purpose Hardware)가 어떻게 작동하는지 보여주는 파이프라인 다이어그램들이다. 이 슬라이드들이 나오는 이유는 **“범용 CPU가 utilization을 올리려면 이렇게 복잡해져야 하는데, DNN에는 이 복잡도가 전부 낭비”**라는 걸 깔기 위함이다.
Simple In-Order Pipeline (L01-23)
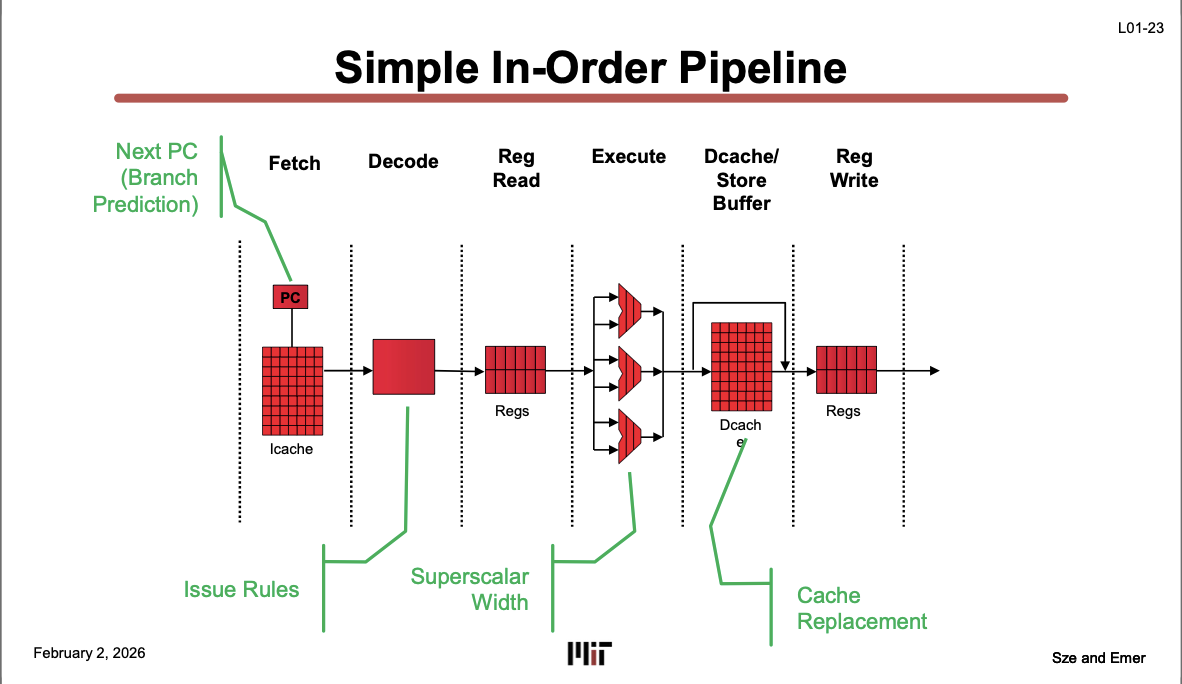
5-stage pipeline(IF→ID→EX→MEM→WB)의 ID 단계를 Decode와 Reg Read로 분리하여 6단계로 만든 구조다. 스테이지당 작업량이 줄어 클럭 주파수를 높일 수 있다. Width가 1보다 크므로 Superscalar라고 부를 수 있다.
각 스테이지:
Fetch — PC가 가리키는 주소로 Icache(명령어 캐시)에서 명령어를 가져옴. 다음 PC는 Branch Prediction으로 결정 — 분기 결과를 미리 예측해서 stall 없이 계속 fetch.
Decode — 가져온 명령어를 해석하여 opcode, rs, rd, immediate 값을 파싱.
Reg Read — 레지스터 파일(Regs)에서 소스 오퍼랜드 값을 읽어옴. Superscalar Width만큼 동시에 여러 오퍼랜드를 읽음.
Execute — ALU(그림에서 빨간색 chevron 기호)에서 실제 연산을 수행. chevron이 3개 = functional unit 3개 (예: Integer ALU, FP/Multiply Unit, Branch Unit 조합). Superscalar Width는 이 functional unit 개수와 맞춰서 설계되며, 이 그림에서는 width = 3.
Dcache/Store Buffer — 메모리 접근 단계. Load면 Dcache에서 데이터를 읽고, Store면 Store Buffer에 써놓고 나중에 캐시에 반영.
Reg Write — 연산 결과를 레지스터 파일에 다시 쓴다 (5-stage pipeline에서의 Write-Back).
Basic Out-of-Order Pipeline (L01-24)
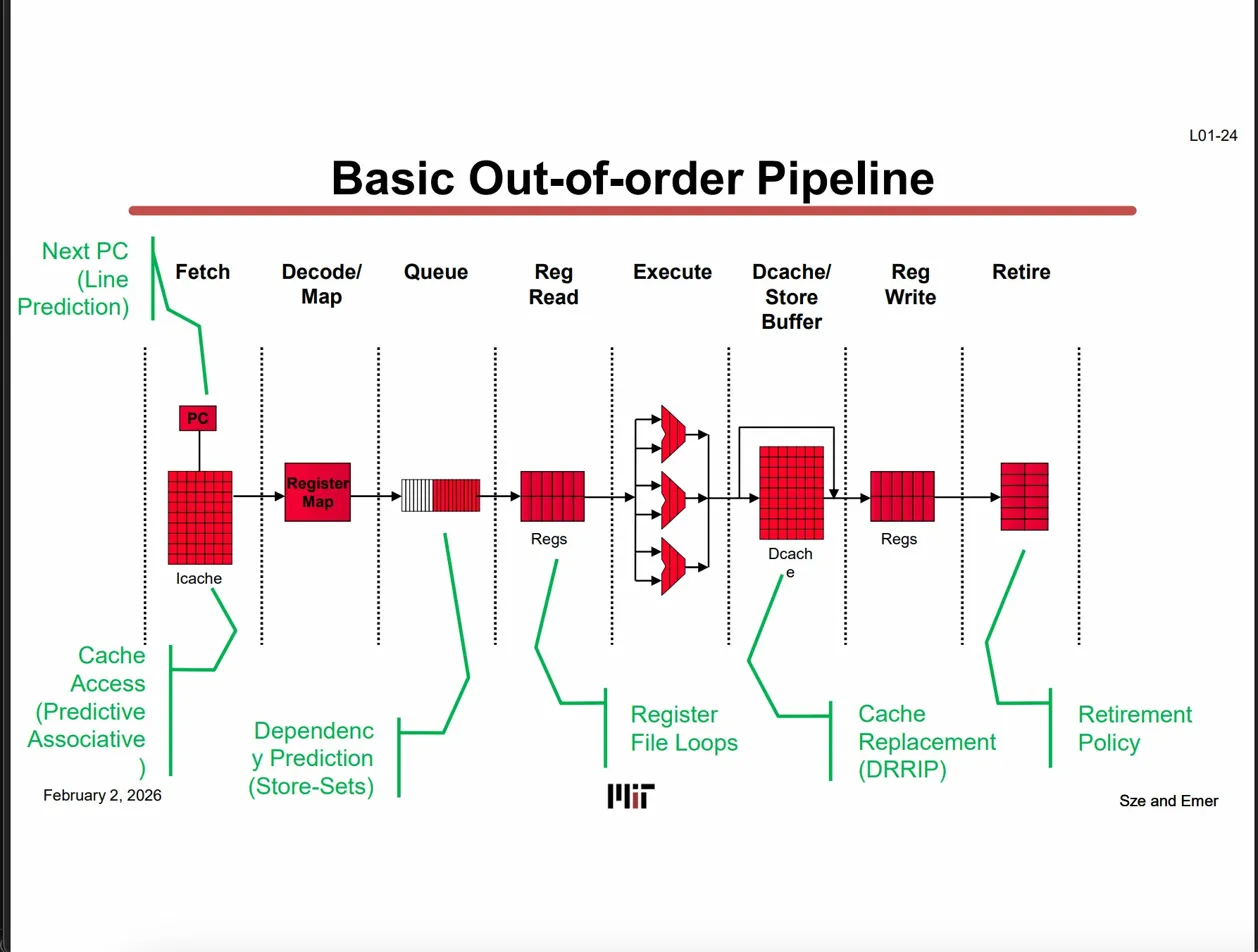
In-Order → Out-of-Order로 바뀌며 생긴 것:
In-Order Superscalar의 한계는 명확하다. Functional unit이 3개(width=3)여도 앞 명령어가 캐시 미스로 막히면 뒤 명령어들도 전부 Stall된다. Superscalar width를 아무리 늘려도 Throughput이 증가하지 않는다.
OoO는 이를 해결하기 위해 **Priority Queue(Issue Queue)**를 추가했다. 캐시 미스로 한 명령어가 막혀도 오퍼랜드가 준비된 나머지 명령어들은 순서 무관하게 먼저 Execute로 보내므로 계속 실행 가능하게 됐다.
SMT — Simultaneous Multi-Threading (L01-25)
SIMT(GPU)가 아님 주의. SMT ≠ SIMT.
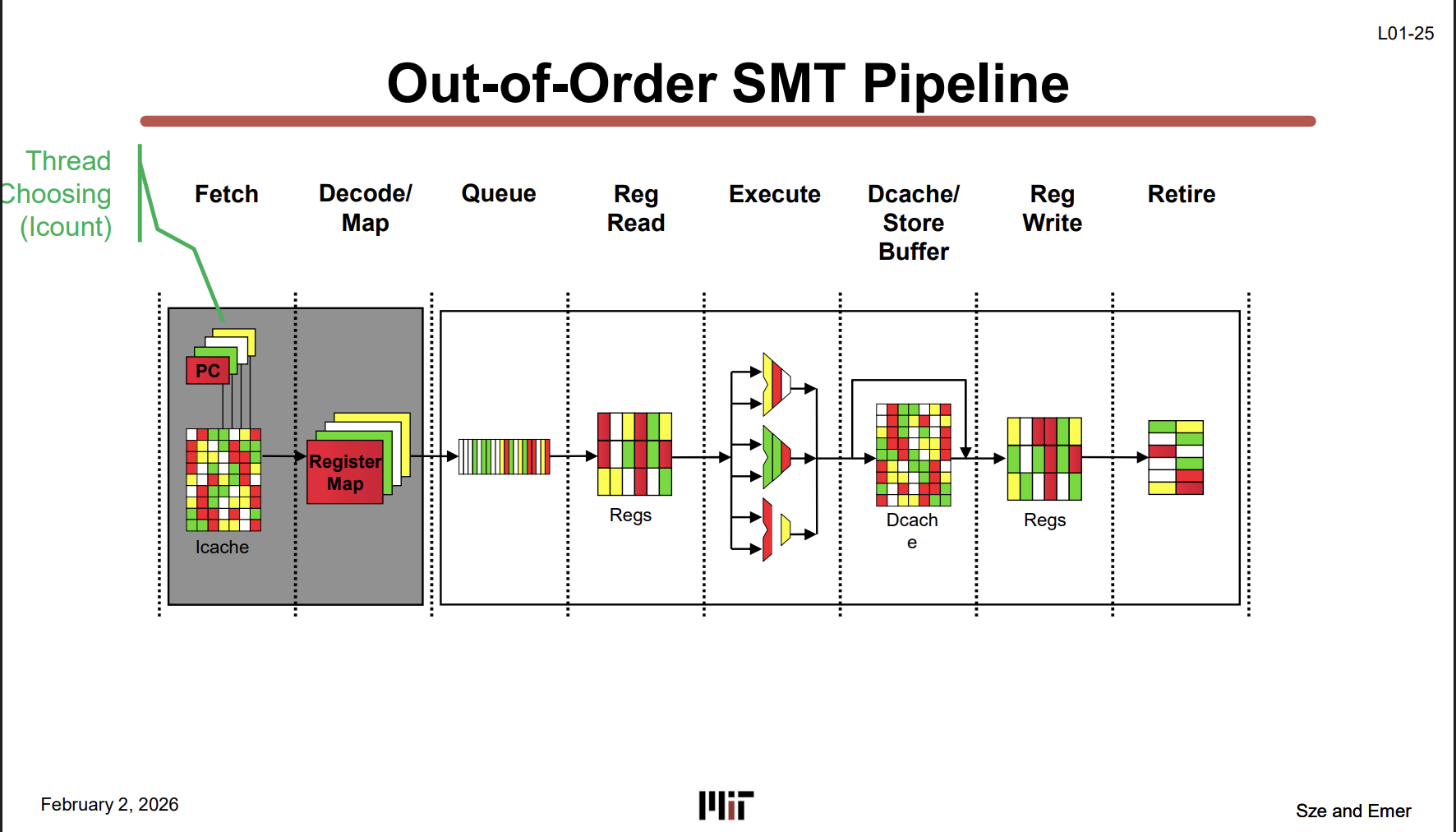
그림에서 보이는 Red/Yellow/Green은 서로 다른 스레드를 의미한다. 핵심은 파이프라인 하드웨어를 복사한 게 아니라 하나의 파이프라인을 여러 스레드가 나눠 쓴다는 것이다. (이걸 유별나고 지랄나게 잘 쓰는 곳이 Intel이다 — Hyper-Threading이라고 있다.)
SMT는 어려워 보이지만 Out-of-Order Pipeline에 Thread Choosing만 추가하여 여러 스레드가 하나의 파이프라인을 공유해서 빈 슬롯을 채움으로써 Throughput을 늘린다.
파이프라인 진화 정리:
| 구조 | 특징 |
|---|---|
| Scalar | 5-stage, width=1, 한 사이클에 명령어 1개 |
| Superscalar (In-Order) | width>1, 한 사이클에 여러 개, 순서대로 |
| OoO + Superscalar | width>1, 한 사이클에 여러 개, 준비된 것부터 |
| OoO + SMT | 위에 + 여러 스레드가 파이프라인 공유 |
이 모든 제어 로직(Branch Prediction, Register Renaming, Issue Queue, Retire, Thread Choosing…)이 범용성을 위한 오버헤드다. DNN은 연산 패턴이 규칙적(MatMul의 반복)이라 이런 게 전부 불필요 → Accelerator에서는 이걸 다 빼고 PE array + memory hierarchy만 남긴다.
Every Accelerator is Unique (L01-26)
이제 본론이다. CPU는 DNN Accelerator에 쓸모없다는 것을 알게 되었다.
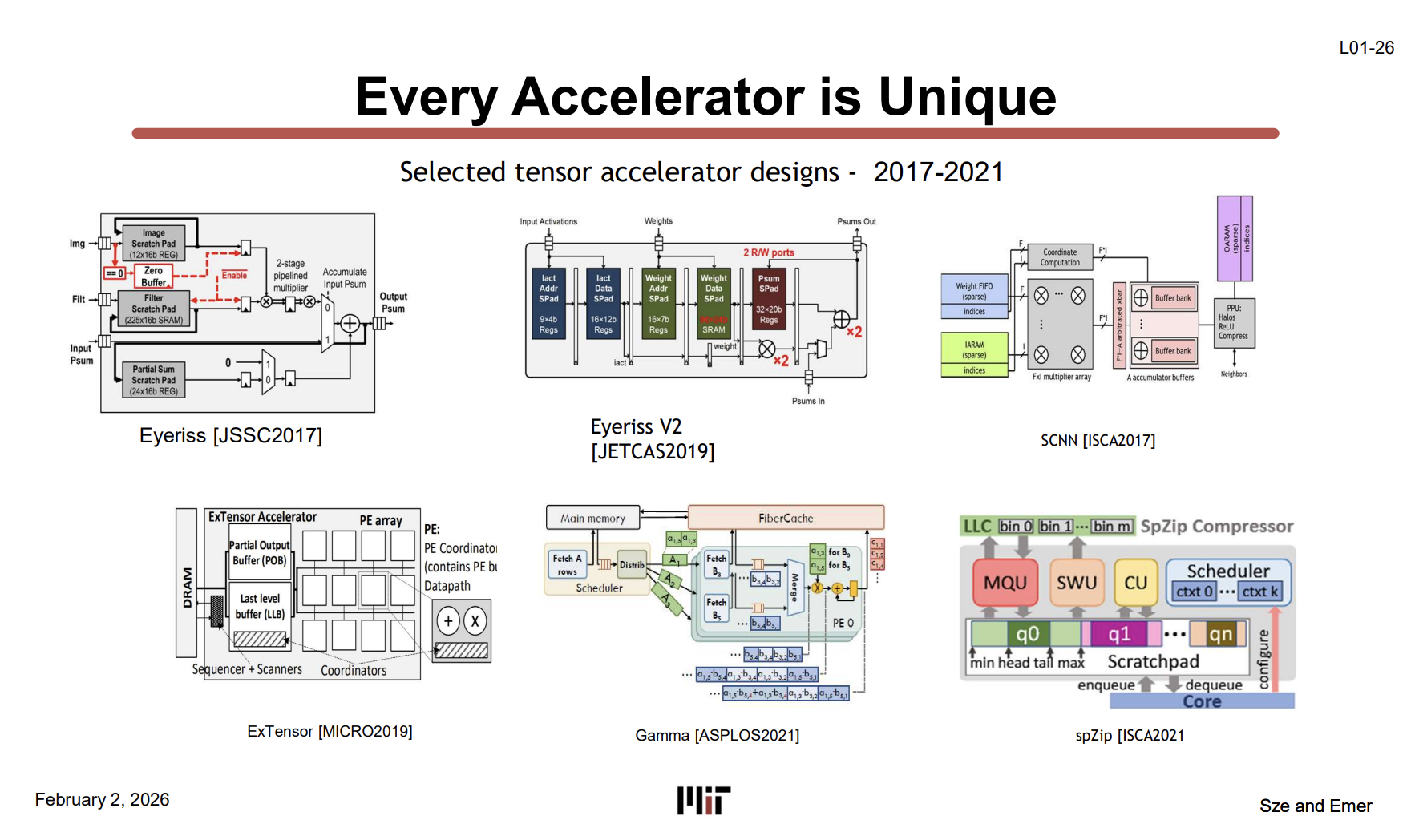
DNN Accelerator에도 여러 종류가 존재한다. 위 사진의 설계들은 전부 텐서 연산 가속기인데 생긴 것이 다 다르다:
- Eyeriss [JSSC2017] — CNN inference용, PE마다 local scratchpad 있는 spatial array
- Eyeriss V2 [JETCAS2019] — Eyeriss 개선판, 유연한 NoC 추가
- SCNN [ISCA2017] — sparse CNN 전용, 0인 값 건너뛰는 구조
- ExTensor [MICRO2019] — sparse tensor 연산 가속
- Gamma [ASPLOS2021] — sparse matrix 곱셈 특화
- spZip [ISCA2021] — sparse 데이터 압축/해제 특화
결론은 하나다: 모든 Accelerator는 다 다르게 설계된다. CPU는 파이프라인 구조가 표준화되어 있지만, DNN Accelerator는 타겟 워크로드(dense/sparse, CNN/Transformer 등)에 따라 PE 배치, 메모리 계층, 데이터 흐름이 전부 다르다. 이 수업에서 이런 설계 차이를 분석하는 프레임워크를 배운다.
PE(Processing Element) = 연산 유닛 하나. CPU에서 ALU가 하는 역할을 DNN Accelerator에서는 PE라고 부른다. 안에 곱셈기 + 덧셈기 + 작은 레지스터 파일이 들어있어서 MAC(Multiply-Accumulate) 연산을 수행한다.
TeAAL Pyramid of Concerns & FuseMax (L01-28 ~ L01-34)
여기서부터 생소한 용어가 남발된다. 그냥 넘어가도 좋다 — 다음 강의에서 자세하게 다룬다.
TeAAL Pyramid of Concerns (L01-28)
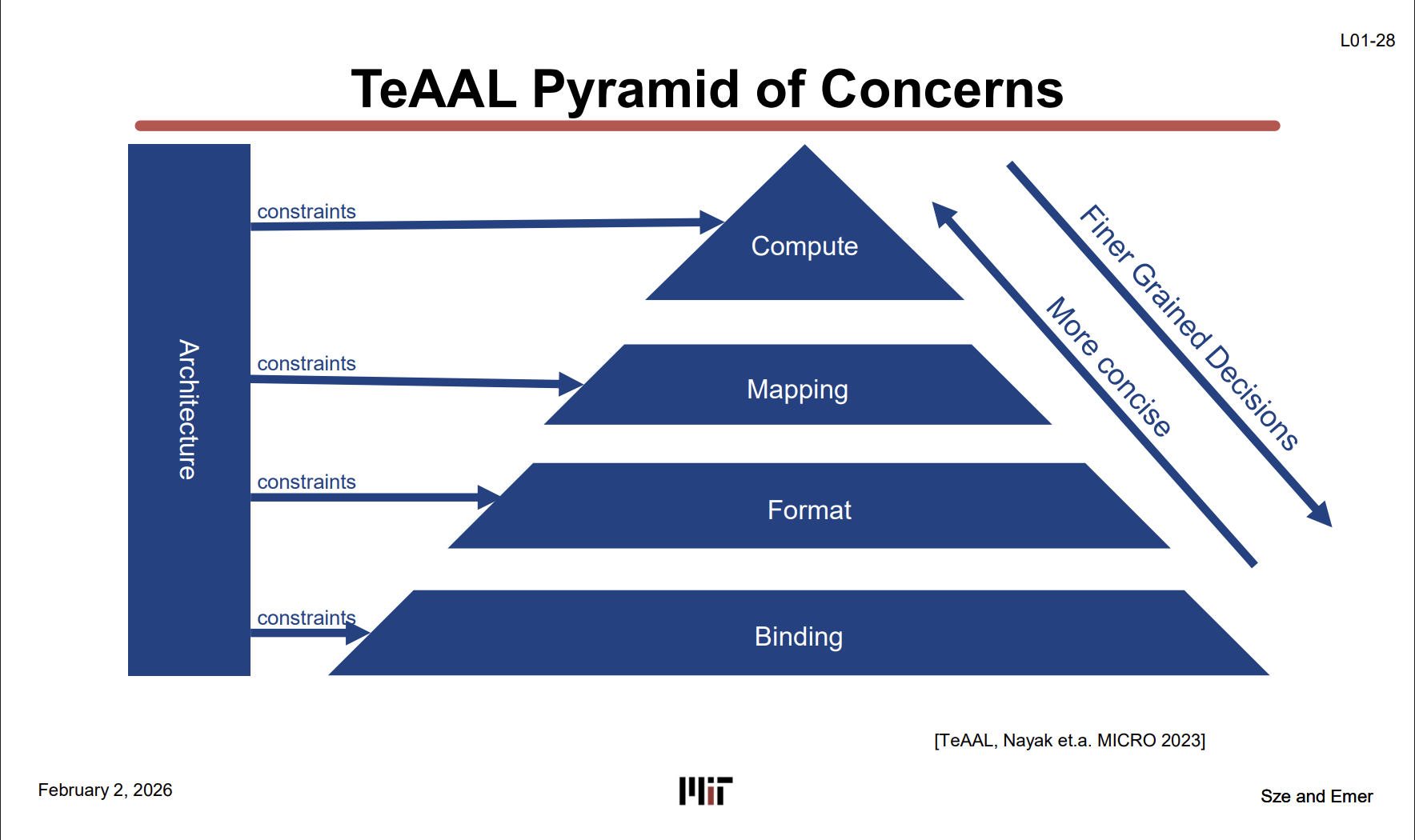
Accelerator 설계를 4개 계층으로 분해하는 프레임워크다. 왼쪽의 Architecture가 각 계층에 constraint를 걸고, 위로 갈수록 결정이 세밀해진다(Finer Grained). OSI 7 Layer가 네트워크를 계층별로 분리한 것처럼, 이 피라미드도 accelerator 설계 결정을 계층별로 분리한다.
| 계층 | 의미 | 수업 연결 |
|---|---|---|
| Compute (꼭대기) | 어떤 연산을 하느냐 (MatMul, Attention) | Lab 1: Einsum |
| Mapping | 연산을 HW에 어떻게 배치 (tiling, dataflow) | Lab 2, 3 |
| Format | 데이터 저장 형태 (dense, sparse 등) | Lab 4: Sparsity |
| Binding (바닥) | 물리적 HW에 할당 (PE, Buffer) | Lab 2, 3 |
이 피라미드가 수업 전체를 관통하는 프레임워크다.
FuseMax — 피라미드 실제 적용 사례 (L01-29)
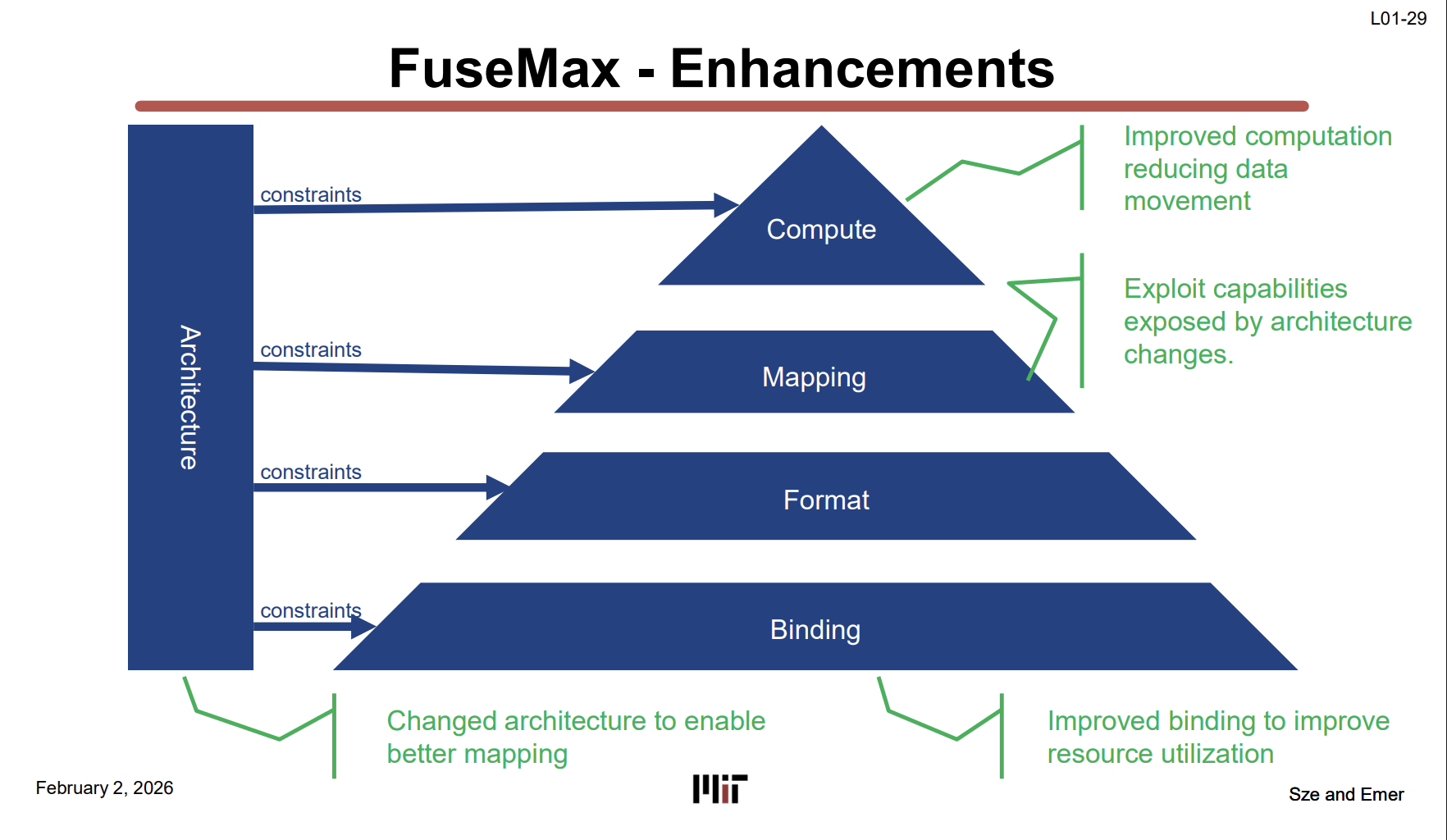
FuseMax [Nayak et al., MICRO 2024]는 Transformer Attention 가속 설계다. 각 계층에서 하나씩 개선하여 PE utilization을 **0% → ~90%**로 끌어올렸다.
| 단계 | 계층 | 개선 내용 | 결과 |
|---|---|---|---|
| Cascade | Compute | MatMul+Softmax fuse, data movement 제거 | util 소폭 상승 |
| Arch 변경 | Architecture → Mapping | 새로운 mapping 가능하게 아키텍처 수정 | util 유의미 상승 |
| Binding 개선 | Binding | PE에 효율적 할당, 자원 활용 극대화 | util ~90% |
용어 정리:
- Unfused = Attention의 각 단계(Q×K → Softmax → ×V)를 따로따로 실행. 매번 중간 결과를 메모리에 쓰고 다시 읽음.
- FLAT = 기존의 부분적 fuse 방식 (prior work).
- Cascade = FuseMax의 완전한 fuse. 중간 결과를 메모리에 안 쓰게 만듦.
Takeaway: Accelerator 성능은 단일 요소가 아니라 피라미드의 모든 계층이 함께 최적화되어야 나온다.
PE Utilization 변화 (L01-30 ~ L01-34)
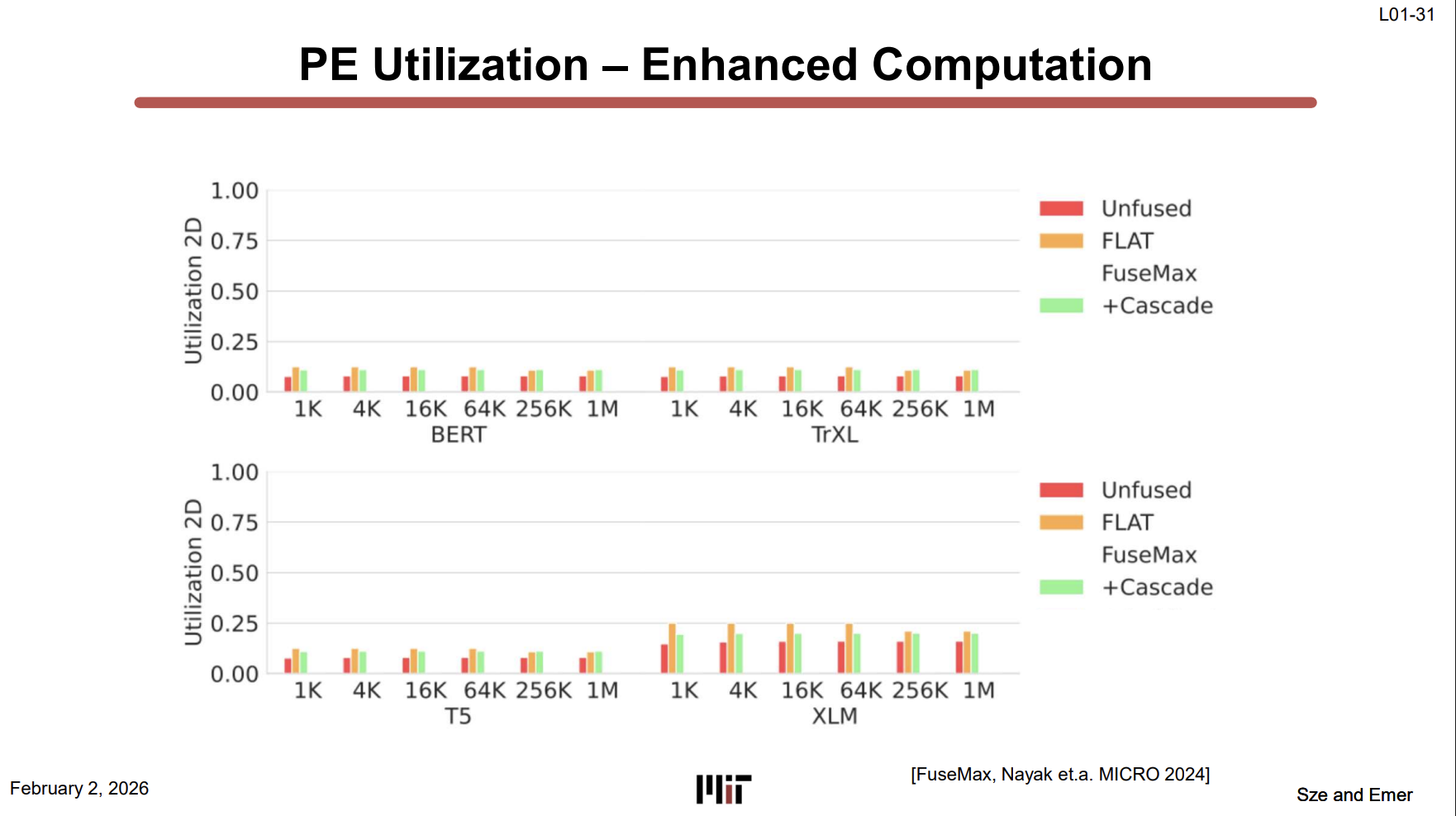
L01-30 그래프: Baseline 상태에서 BERT, TrXL, T5, XLM 모든 모델, 모든 시퀀스 길이(1K~1M)에서 PE utilization이 전부 0.25 이하다. PE 수백 개 깔아놨는데 대부분이 놀고 있다는 뜻.
- x축 = 시퀀스 길이 (1K ~ 1M)
- y축 = PE utilization (0 ~ 1.0)
- 빨간색 = Unfused (연산 분리), 주황색 = FLAT (기존 fused 방식). 둘 다 처참.
이후 L01-31~33에서 Cascade → Architecture → Binding 개선을 순차 적용하면서 utilization이 ~90%까지 올라간다.
L01-43
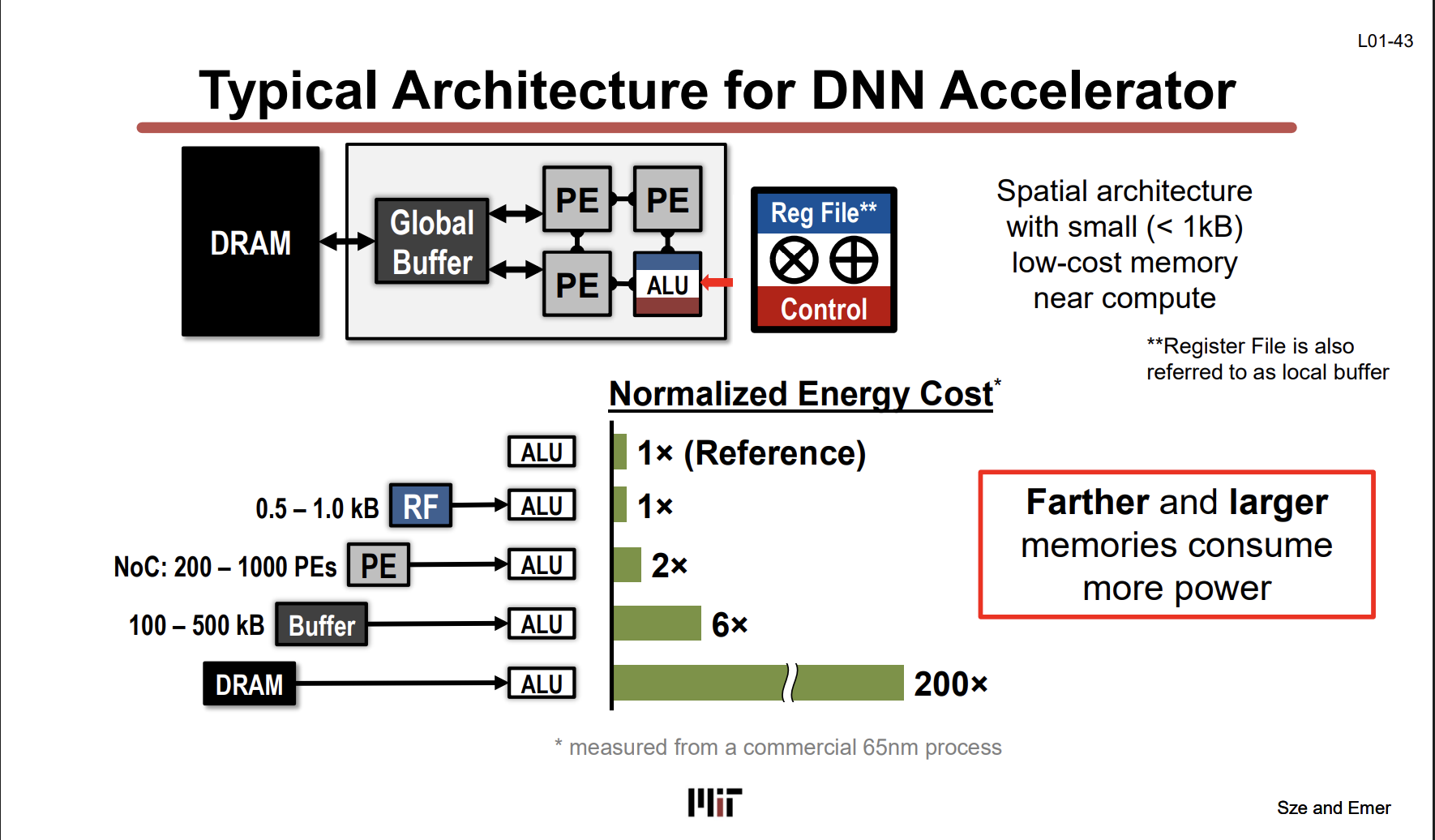
DNN Accelerator의 전형적인 구조다. CPU의 복잡한 파이프라인(Branch Prediction, OoO, SMT…)을 전부 걷어내고, PE array + memory hierarchy만 남긴 구조.
구조 (왼쪽 → 오른쪽):
DRAM → Global Buffer(100500kB) → PE array(2001000개) → 각 PE 안에 Reg File(<1kB) + ALU + Control
각 PE는 MAC(Multiply-Accumulate) 연산만 하는 작고 단순한 유닛이다. CPU처럼 Branch Prediction이나 Register Renaming 같은 제어 로직이 없어서 같은 칩 면적에 연산 유닛을 훨씬 많이 깔 수 있다.
핵심: Normalized Energy Cost (65nm 기준)
| 데이터를 어디서 가져오냐 | 에너지 비용 |
|---|---|
| ALU 연산 자체 | 1× (기준) |
| Reg File(0.5~1kB) → ALU | 1× |
| PE간 NoC → ALU | 2× |
| Global Buffer(100~500kB) → ALU | 6× |
| DRAM → ALU | 200× |
DRAM에서 데이터 한 번 가져오는 에너지 = 실제 연산의 200배. 이게 L01-8에서 말한 “data movement > computation"의 구체적 숫자다.
그래서 accelerator 설계의 핵심 목표: 데이터를 최대한 PE 가까이(Reg File, Global Buffer)에 두고, DRAM 접근 횟수를 최소화한다. FlashAttention이 HBM 대신 SRAM에서 tiling하는 것도, Cerebras가 18GB SRAM을 박은 것도 전부 이 원리.
“Farther and larger memories consume more power” — 이 한 줄이 이 수업의 핵심 원리이다.
L01-44 Aceelerator 설계 시 결정해야 할 것들 (L01-44)
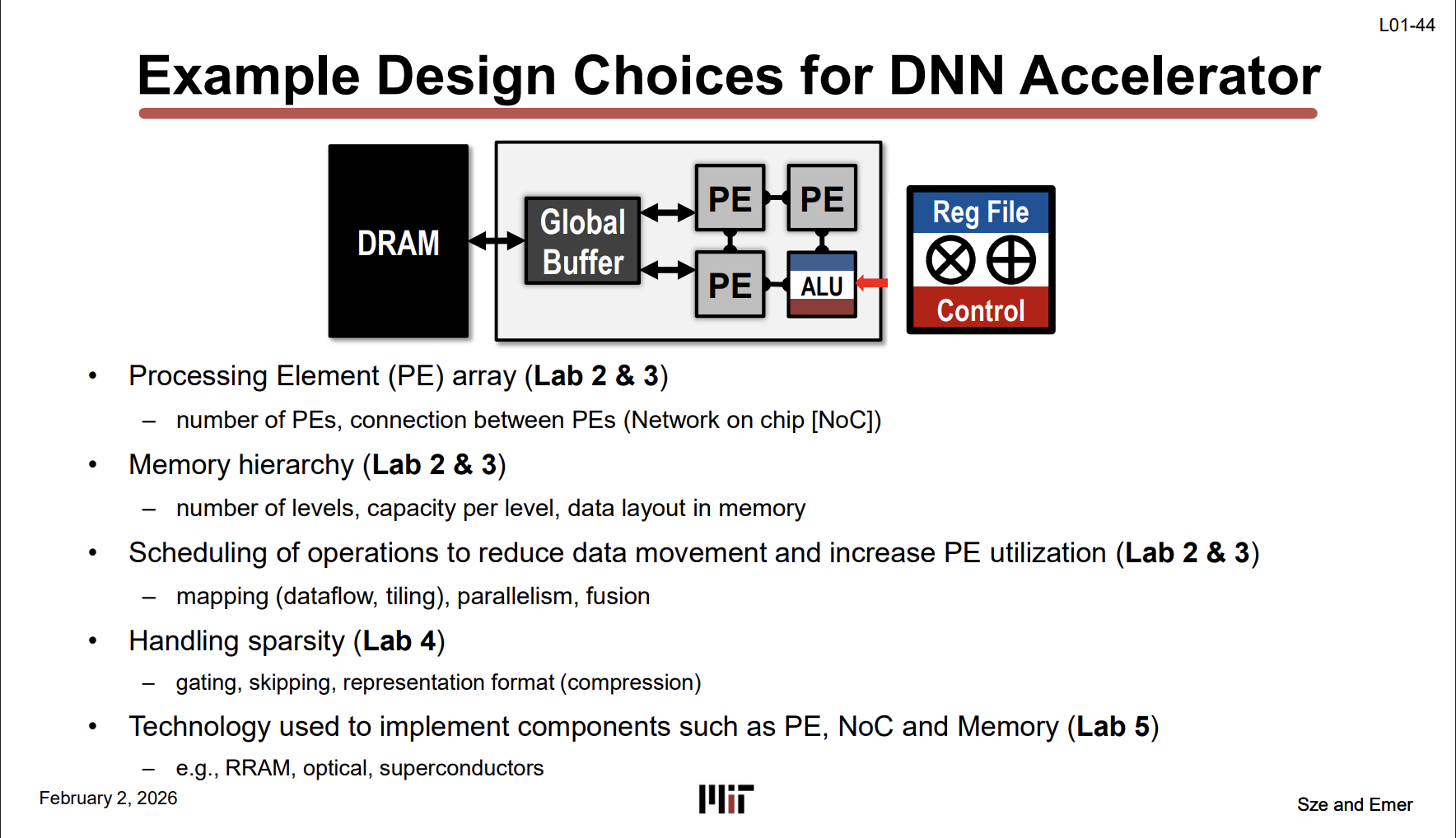
위 구조에서 설계자가 결정해야 하는 항목들이고, 각각이 이 수업의 Lab에 직접 매핑된다:
| 설계 결정 | 구체적 내용 | Lab |
|---|---|---|
| PE array | PE 개수, PE 간 연결 방식 (NoC) | Lab 2, 3 |
| Memory hierarchy | 몇 단계, 각 단계 용량, 데이터 배치 | Lab 2, 3 |
| Scheduling | mapping(dataflow, tiling), parallelism, fusion | Lab 2, 3 |
| Sparsity 처리 | gating, skipping, 압축 포맷 | Lab 4 |
| 구현 기술 | RRAM, optical, superconductors 등 | Lab 5 |
TeAAL Pyramid의 각 계층(Compute, Mapping, Format, Binding)이 여기서 구체적인 설계 결정으로 내려온다고 보면 된다.
Roofline Model로 Accelerator 비효율 분석하기 (L01-45)
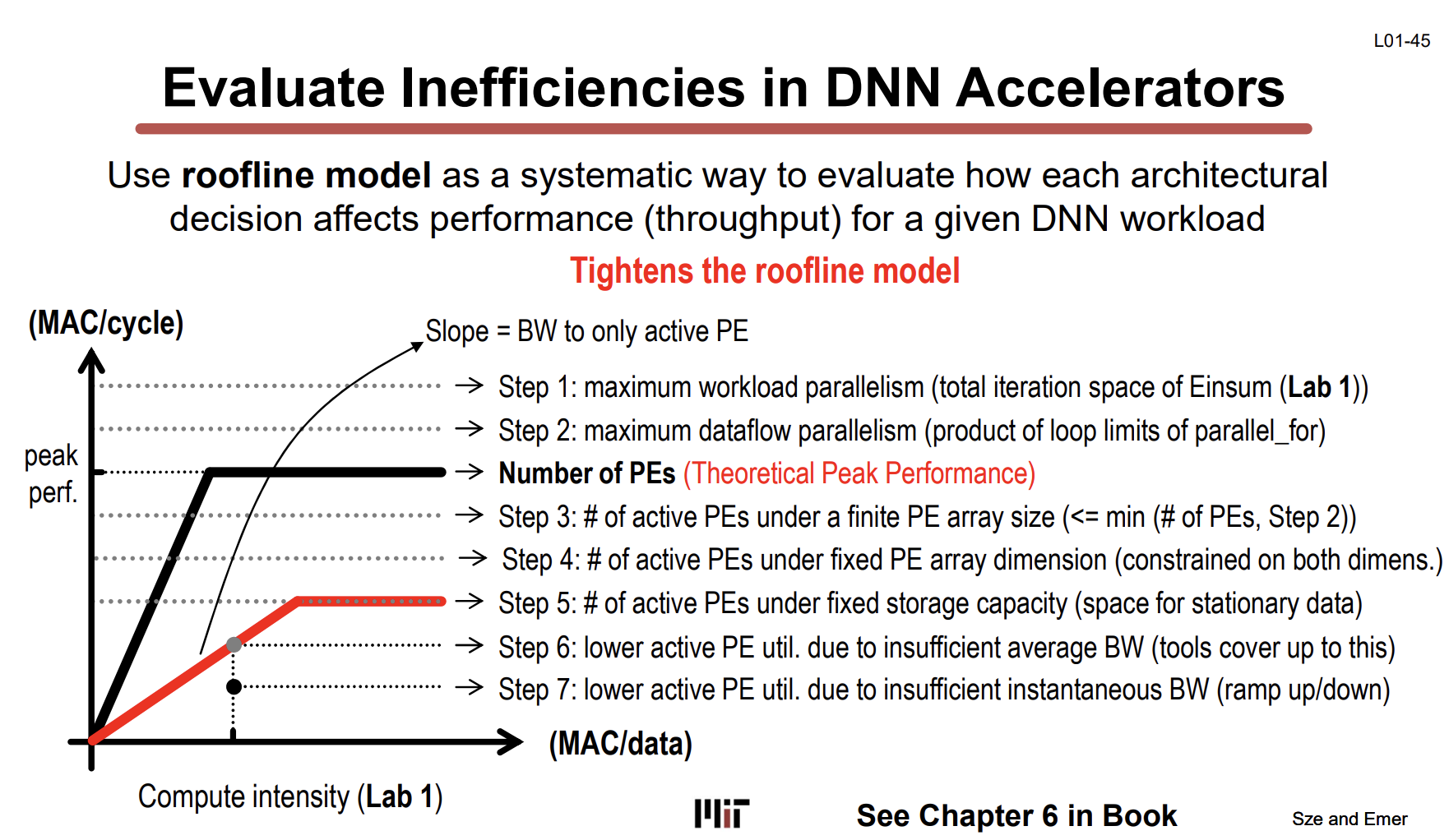
Roofline Model은 accelerator의 성능 bottleneck이 compute-bound인지 memory-bound인지 판별하는 프레임워크다. Lab 1부터 직접 쓴다.
축 해석:
- x축 = Compute Intensity (MAC/data) — 데이터 1개당 몇 번 연산하느냐. 높을수록 compute-heavy.
- y축 = 성능 (MAC/cycle) — 사이클당 실제 처리한 연산 수.
- 기울기 = 메모리 bandwidth
그래프의 핵심:
- 왼쪽 경사면에 있으면 → memory-bound (데이터를 가져오는 게 병목)
- 오른쪽 평탄면에 있으면 → compute-bound (연산 유닛이 병목)
Step 1~7은 “이론적 peak에서 실제 성능까지 왜 떨어지는가"를 계단식으로 보여준다:
| Step | 제약 요인 | Lab |
|---|---|---|
| Step 1 | 워크로드 자체의 최대 병렬성 (Einsum 전체 iteration space) | Lab 1 |
| Step 2 | dataflow가 허용하는 최대 병렬성 (parallel_for 한계) | Lab 2, 3 |
| PE 개수 | Theoretical Peak Performance (하드웨어 한계) | — |
| Step 3 | 유한한 PE array 크기 | Lab 2, 3 |
| Step 4 | PE array 차원 제약 (2D array면 양쪽 다 제한) | Lab 2, 3 |
| Step 5 | 유한한 storage 용량 (stationary data 공간) | Lab 2, 3 |
| Step 6 | 평균 bandwidth 부족 | Lab 2, 3 |
| Step 7 | 순간 bandwidth 부족 (ramp up/down) | — |
위에서 아래로 갈수록 roofline이 조여진다(tightens). 이론적 peak에서 시작해서 현실적 제약을 하나씩 반영하면 실제 달성 가능한 성능이 나온다.
실제 Roofline — Nsight Compute에서 본 모습
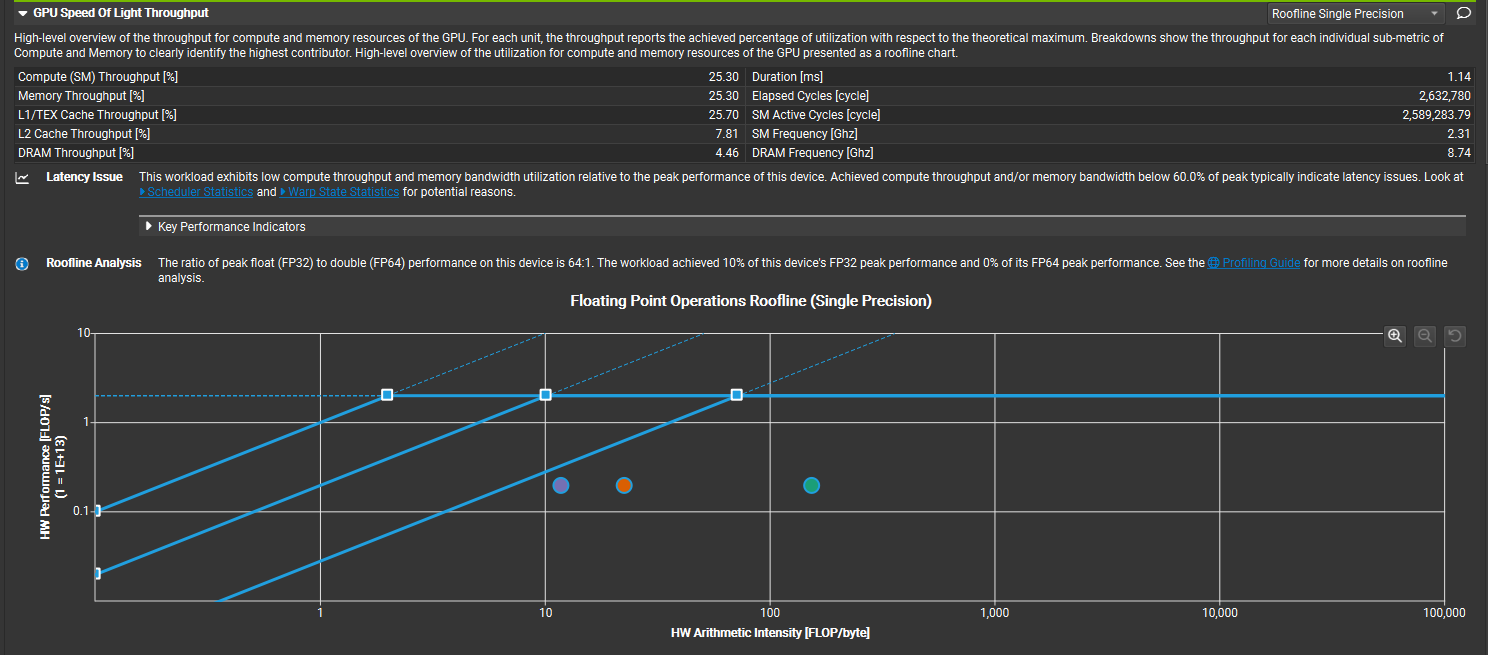
위는 FlashAttention forward 커널을 Nsight Compute로 프로파일링한 roofline이다. L01-45의 개념이 실제 GPU에서 이렇게 보인다:
- x축 = HW Arithmetic Intensity (FLOP/byte)
- y축 = HW Performance (FLOP/s)
- 파란 선들 = 각 메모리 계층(DRAM, L2, L1)의 bandwidth roofline
- 파란 점선(수평) = compute peak (이 HW의 이론적 최대 연산 성능)
- 색깔 점 = 실제 커널의 측정값. roofline 아래에 있으면 그만큼 비효율이 있다는 뜻.
Compute (SM) Throughput 25.30%, DRAM Throughput 4.46%로 둘 다 낮은 건 아직 최적화 여지가 많다는 의미다. 이 수업에서 배우는 Step 1~7 분석이 정확히 “왜 peak 대비 이렇게 낮은지"를 체계적으로 진단하는 도구인 거다.
L01-45와 Nsight Compute의 차이: L01-45는 DNN Accelerator(PE array) 관점이고, Nsight Compute는 GPU(SM/warp) 관점이다. 프레임워크는 같지만 하드웨어 용어가 다르다 — PE ↔ SM, Reg File ↔ Shared Memory, Global Buffer ↔ L2 Cache, DRAM ↔ HBM.